蓝桥杯单片机温度传感器DS18B20(基于STC15F2K60S2)_stc15f2k60s2单片机读取ds18b20温度检测-程序员宅基地

可以看到,温度传感器DS18B20接在P14上并进行了上拉
sbit DQ=P1^4;我们通过单总线端口对温度传感器进行控制,步骤如下:

需要注意的是,通过单线总线的所有执行(处理)都从一个初始化序列开始。也就是说所有的操作前都需要初始化一次。
那么先要进行初始化:
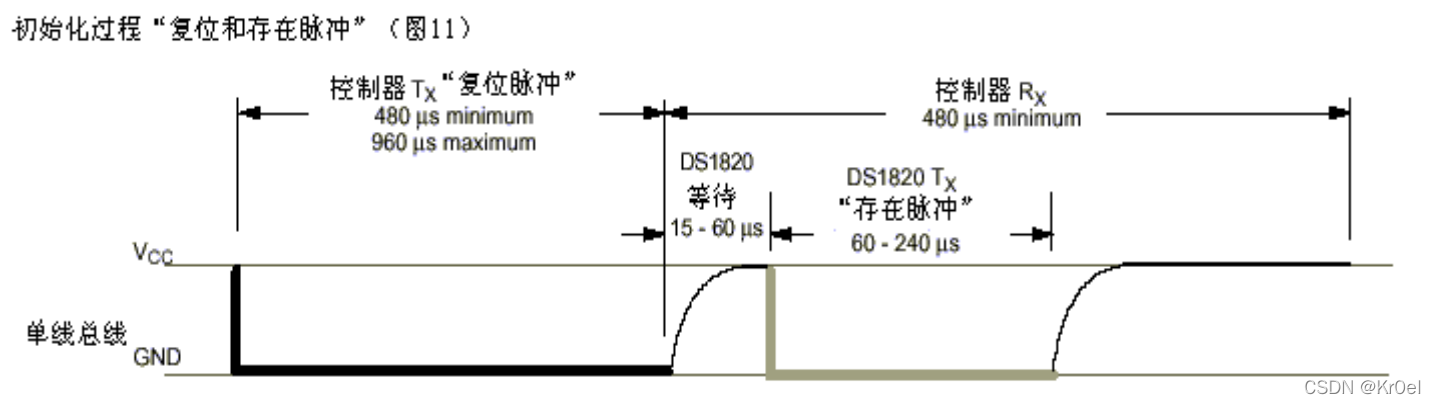
根据时序图可以看出,我们需要先拉低,等待480us再拉高,接下来传感器自己拉低,控制完成
void Init_DS18B20(void)//传感器初始化
{
DQ=0;
Delay500us();
DQ=1;
Delay500us();
}初始化完成之后,就可以开始操作了
这时候我们需要用到ROM指令,主要用到三种:忽略、温度转换和读暂存器
第一种:忽略ROM指令

常规来讲,我们需要进行ROM识别来确定到自己想用的外设,但是P14上只有一个温度传感器,所以不需要识别,直接忽略即可
DS18B20_WriteByte(0XCC);第二种:温度转换指令

Init_DS18B20();
DS18B20_WriteByte(0XCC);
DS18B20_WriteByte(0X44);第三种:读暂存器指令

在暂存器前需要进行初始化
Init_DS18B20();
DS18B20_WriteByte(0XCC);
DS18B20_WriteByte(0XBE);读数据的过程:
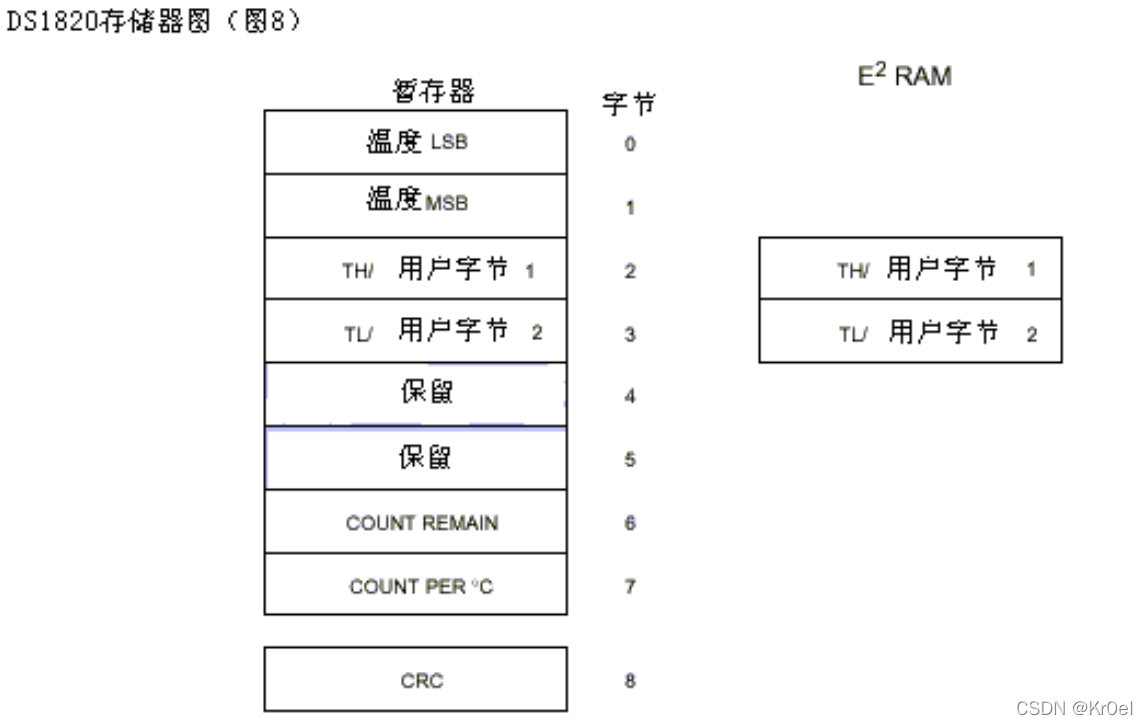
从上到下依次进行读,我们只需要第一、二次读的温度低八位和高八位就够了
low=DS18B20_ReadByte();//第一次读低八位(byte0)
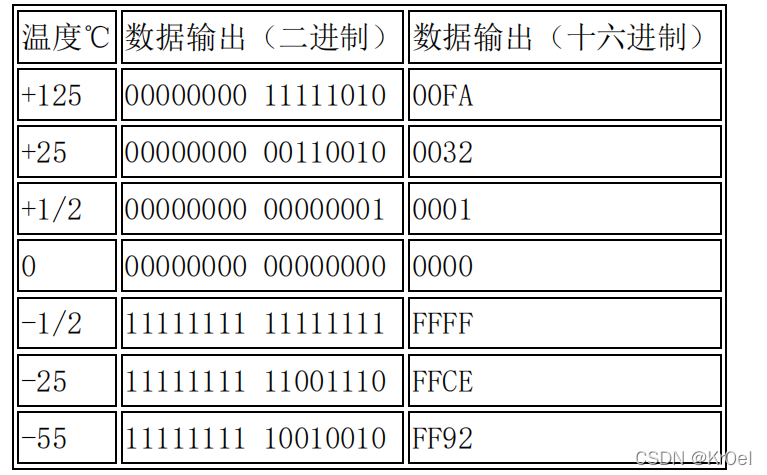
high=DS18B20_ReadByte();//第二次读高八位(byte1)温度/数据关系:
读写时序
这里注意所有的数据和指令的传递都是从最低有效位开始
写时序:
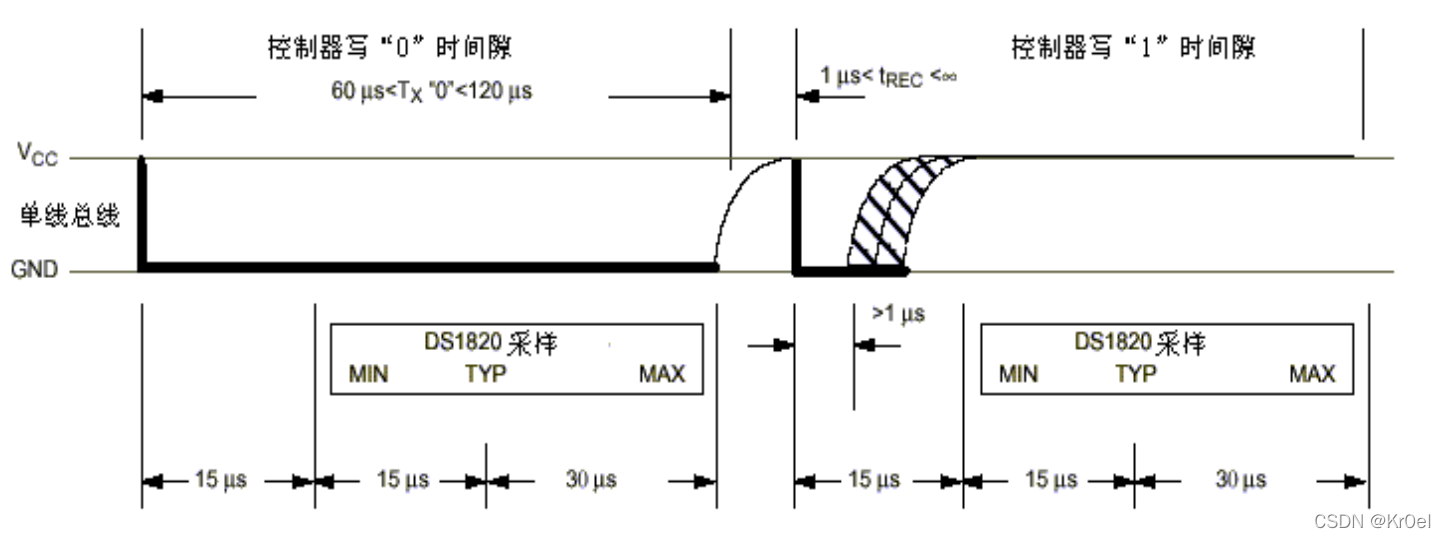
先拉低,保持15us后DS18B20开始采集,此时若为低电平则DS18B20得到0,高电平则为1,总时长至少保持60us(从拉低到采集完)
void DS18B20_WriteByte(u8 dat)
{
u8 j;
for(j=0;j<8;j++)
{
DQ=0;
DQ=dat&0X01;//判断最后一位是高电平还是低电平
Delay80us();//最低60us
dat>>=1;//移位准备进行下一位的传输
DQ=1;
}
}读时序:
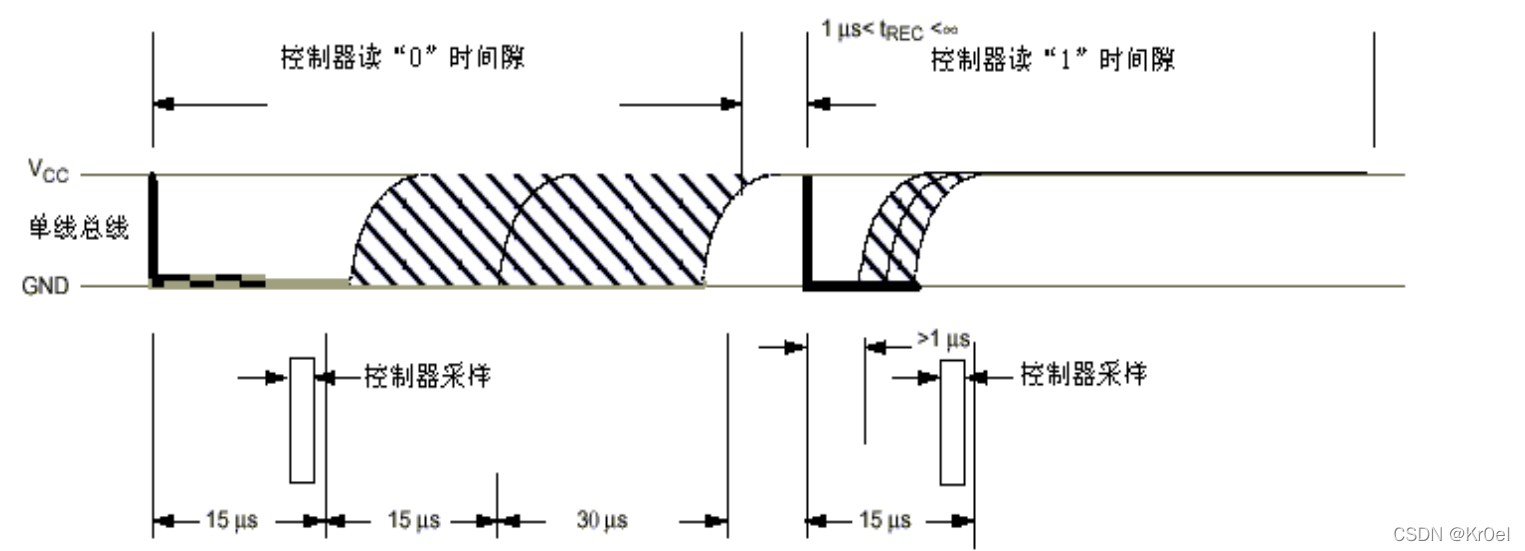
先拉低,采样后拉高,然后根据DS18B20自身为0或1来读0或1
u8 DS18B20_ReadByte()
{
u8 i;
u8 dat=0;
for(i=0;i<8;i++)
{
DQ=0;
dat>>=1;
DQ=1;
if(DQ==1)
{
dat|=0X80;
}
Delay80us();
}
return dat;
}整理读到的数据:
低八位的后四位是小数点,高八位的前四位是正负表示,不需要的话需要清除
temp=high<<4;
temp=temp|(low>>4);如果需要读小数点的话:
temp=high&0x0f;//不显示正负
temp<<=8;
temp=temp|low;
temp=temp*625;//精度为0.0625最后整体代码
#include <STC15F2K60S2.H>
#include<intrins.h>
#define u8 unsigned char
#define u16 unsigned int
u8 yi,er,san,si,wu,liu,qi,ba;
u8 tab[]={0XC0,0XF9,0XA4,0XB0,0X99,0X92,0X82,0XF8,0X80,0X90,0XFF};
sbit DQ=P1^4;
u8 num,temper,tt;
void Allinit(void);
void DS18B20_WriteByte(u8 dat);
u8 TemperGet();
void Init_DS18B20(void);
void Delay500us(void);
void Delay80us();
void Delay100us(void);
u8 DS18B20_ReadByte();
void Display1(u8 yi,u8 er);
void Display2(u8 san,u8 si);
void Display3(u8 wu,u8 liu);
void Display4(u8 qi,u8 ba);
void Delay(u8 ms);
void main()
{
yi=10;er=10;san=10;si=10;wu=10;liu=10;qi=10;ba=10;
Allinit();
Init_DS18B20();
DS18B20_WriteByte(0XCC);
DS18B20_WriteByte(0X44);
while(1)
{
if(++tt==120)//隔一段时间进行显示
{
tt=0;
temper=TemperGet();
yi=temper/10;er=temper%10;
}
Display1(yi,er);
Display2(san,si);
Display3(wu,liu);
Display4(qi,ba);
}
}
u8 DS18B20_ReadByte()
{
u8 i;
u8 dat=0;
for(i=0;i<8;i++)
{
DQ=0;
dat>>=1;
DQ=1;
if(DQ==1)
{
dat|=0X80;
}
Delay80us();
}
return dat;
}
void DS18B20_WriteByte(u8 dat)
{
u8 j;
for(j=0;j<8;j++)
{
DQ=0;
DQ=dat&0X01;//判断最后一位是高电平还是低电平
Delay80us();//最低60us
dat>>=1;//移位准备进行下一位的传输
DQ=1;
}
}
u8 TemperGet()//开始工作
{
u8 low,high,temp;
Init_DS18B20();
DS18B20_WriteByte(0XCC);
DS18B20_WriteByte(0X44);
Delay500us();
Init_DS18B20();
DS18B20_WriteByte(0XCC);//进行下一个流程
DS18B20_WriteByte(0XBE);
low=DS18B20_ReadByte();
high=DS18B20_ReadByte();
temp=high<<4;
temp=temp|(low>>4);
return temp;
}
void Allinit(void)
{
P2=0X80;P0=0XFF;//LED灯
P2=0XA0;P0=0X00;//蜂鸣器,继电器
P2=0XC0;P0=0XFF;//数码管位选
P2=0XE0;P0=0XFF;//数码管全关闭
}
void Delatems(int ms)
{
int i,j;
for(i=0;i<ms;i++)
for(j=0;j<845;j++);
}
void Delay500us(void) //@11.0592MHz
{
unsigned char i, j;
_nop_();
_nop_();
i = 6;
j = 93;
do
{
while (--j);
} while (--i);
}
void Delay80us() //@11.0592MHz
{
unsigned char i;
_nop_();
_nop_();
_nop_();
i = 218;
while (--i);
}
void Init_DS18B20(void)//传感器初始化
{
DQ=0;
Delay500us();
DQ=1;
Delay500us();
}
void Display1(u8 yi,u8 er)
{
P2=0XC0;
P0=0X01;
P2=0XE0;
P0=tab[yi];
Delay(100);
P0=0XFF;
Delay(150);
P2=0XC0;
P0=0X02;
P2=0XE0;
P0=tab[er];
Delay(100);
P0=0XFF;
Delay(150);
}
void Display2(u8 san,u8 si)
{
P2=0XC0;
P0=0X04;
P2=0XE0;
P0=tab[san];
Delay(100);
P0=0XFF;
Delay(150);
P2=0XC0;
P0=0X08;
P2=0XE0;
P0=tab[si];
Delay(100);
P0=0XFF;
Delay(150);
}
void Display3(u8 wu,u8 liu)
{
P2=0XC0;
P0=0X10;
P2=0XE0;
P0=tab[wu];
Delay(100);
P0=0XFF;
Delay(150);
P2=0XC0;
P0=0X20;
P2=0XE0;
P0=tab[liu];
Delay(100);
P0=0XFF;
Delay(150);
}
void Display4(u8 qi,u8 ba)
{
P2=0XC0;
P0=0X40;
P2=0XE0;
P0=tab[qi];
Delay(100);
P0=0XFF;
Delay(150);
P2=0XC0;
P0=0X80;
P2=0XE0;
P0=tab[ba];
Delay(100);
P0=0XFF;
Delay(150);
}
void Delay(u8 ms) //1毫秒@11.0592MHz
{
u8 i;
for(i=0;i<ms;i++)
{
AUXR |= 0x80; //定时器时钟1T模式
TMOD &= 0xF0; //设置定时器模式
TL0 = 0xCD; //设置定时初始值
TH0 = 0xD4; //设置定时初始值
TF0 = 0; //清除TF0标志
TR0 = 1; //定时器0开始计时
}
}
智能推荐
js-选项卡原理_选项卡js原理-程序员宅基地
文章浏览阅读90次。【代码】js-选项卡原理。_选项卡js原理
设计模式-原型模式(Prototype)-程序员宅基地
文章浏览阅读67次。原型模式是一种对象创建型模式,它采用复制原型对象的方法来创建对象的实例。它创建的实例,具有与原型一样的数据结构和值分为深度克隆和浅度克隆。浅度克隆:克隆对象的值类型(基本数据类型),克隆引用类型的地址;深度克隆:克隆对象的值类型,引用类型的对象也复制一份副本。UML图:具体代码:浅度复制:import java.util.List;/*..._prototype 设计模式
个性化政府云的探索-程序员宅基地
文章浏览阅读59次。入选国内首批云计算服务创新发展试点城市的北京、上海、深圳、杭州和无锡起到了很好的示范作用,不仅促进了当地产业的升级换代,而且为国内其他城市发展云计算产业提供了很好的借鉴。据了解,目前国内至少有20个城市确定将云计算作为重点发展的产业。这势必会形成新一轮的云计算基础设施建设的**。由于云计算基础设施建设具有投资规模大,运维成本高,投资回收周期长,地域辐射性强等诸多特点,各地在建...
STM32问题集之BOOT0和BOOT1的作用_stm32boot0和boot1作用-程序员宅基地
文章浏览阅读9.4k次,点赞2次,收藏20次。一、功能及目的 在每个STM32的芯片上都有两个管脚BOOT0和BOOT1,这两个管脚在芯片复位时的电平状态决定了芯片复位后从哪个区域开始执行程序。BOOT1=x BOOT0=0 // 从用户闪存启动,这是正常的工作模式。BOOT1=0 BOOT0=1 // 从系统存储器启动,这种模式启动的程序_stm32boot0和boot1作用
C语言函数递归调用-程序员宅基地
文章浏览阅读3.4k次,点赞2次,收藏22次。C语言函数递归调用_c语言函数递归调用
明日方舟抽卡模拟器wiki_明日方舟bilibili服-明日方舟bilibili服下载-程序员宅基地
文章浏览阅读410次。明日方舟bilibili服是一款天灾驾到战斗热血的创新二次元废土风塔防手游,精妙的二次元纸片人设计,为宅友们源源不断更新超多的纸片人老婆老公们,玩家将扮演废土正义一方“罗德岛”中的指挥官,与你身边的感染者们并肩作战。与同类塔防手游与众不同的几点,首先你可以在这抽卡轻松获得稀有,同时也可以在战斗体系和敌军走位机制看到不同。明日方舟bilibili服设定:1、起因不明并四处肆虐的天灾,席卷过的土地上出..._明日方舟抽卡模拟器
随便推点
Maven上传Jar到私服报错:ReasonPhrase: Repository version policy: SNAPSHOT does not allow version: xxx_repository version policy snapshot does not all-程序员宅基地
文章浏览阅读437次。Maven上传Jar到私服报错:ReasonPhrase: Repository version policy: SNAPSHOT does not allow version: xxx_repository version policy snapshot does not all
斐波那契数列、素数、质数和猴子吃桃问题_斐波那契日-程序员宅基地
文章浏览阅读1.2k次。斐波那契数列(Fibonacci Sequence)是由如下形式的一系列数字组成的:0, 1, 1, 2, 3, 5, 8, 13, 21, 34, …上述数字序列中反映出来的规律,就是下一个数字是该数字前面两个紧邻数字的和,具体如下所示:示例:比如上述斐波那契数列中的最后两个数,可以推导出34后面的数为21+34=55下面是一个更长一些的斐波那契数列:0, 1, 1, 2, 3, 5, 8, 13, 21, 34, 55, 89, 144, 233, 377, 610, 987, 1597, 2584,_斐波那契日
PHP必会面试题_//该层循环用来控制每轮 冒出一个数 需要比较的次数-程序员宅基地
文章浏览阅读363次。PHP必会面试题1. 基础篇1. 用 PHP 打印出前一天的时间格式是 2017-12-28 22:21:21? //>>1.当前时间减去一天的时间,然后再格式化echo date('Y-m-d H:i:s',time()-3600*24);//>>2.使用strtotime,可以将任何字符串时间转换成时间戳,仅针对英文echo date('Y-m-d H:i:s',str..._//该层循环用来控制每轮 冒出一个数 需要比较的次数
windows用mingw(g++)编译opencv,opencv_contrib,并install安装_opencv mingw contrib-程序员宅基地
文章浏览阅读1.3k次,点赞26次,收藏26次。windows下用mingw编译opencv貌似不支持cuda,选cuda会报错,我无法解决,所以没选cuda,下面两种编译方式支持。打开cmake gui程序,在下面两个框中分别输入opencv的源文件和编译目录,build-mingw为你创建的目录,可自定义命名。1、如果已经安装Qt,则Qt自带mingw编译器,从Qt安装目录找到编译器所在目录即可。1、如果已经安装Qt,则Qt自带cmake,从Qt安装目录找到cmake所在目录即可。2、若未安装Qt,则安装Mingw即可,参考我的另外一篇文章。_opencv mingw contrib
5个高质量简历模板网站,免费、免费、免费_hoso模板官网-程序员宅基地
文章浏览阅读10w+次,点赞42次,收藏309次。今天给大家推荐5个好用且免费的简历模板网站,简洁美观,非常值得收藏!1、菜鸟图库https://www.sucai999.com/search/word/0_242_0.html?v=NTYxMjky网站主要以设计类素材为主,办公类素材也很多,简历模板大部个偏简约风,各种版式都有,而且经常会更新。最重要的是全部都能免费下载。2、个人简历网https://www.gerenjianli.com/moban/这是一个专门提供简历模板的网站,里面有超多模板个类,找起来非常方便,风格也很多样,无须注册就能免费下载,_hoso模板官网
通过 TikTok 联盟提高销售额的 6 个步骤_tiktok联盟-程序员宅基地
文章浏览阅读142次。你听说过吗?该计划可让您以推广您的产品并在成功销售时支付佣金。它提供了新的营销渠道,使您的产品呈现在更广泛的受众面前并提高品牌知名度。此外,TikTok Shop联盟可以是一种经济高效的产品或服务营销方式。您只需在有人购买时付费,因此不存在在无效广告上浪费金钱的风险。这些诱人的好处是否足以让您想要开始您的TikTok Shop联盟活动?如果是这样,本指南适合您。_tiktok联盟