通常,仿生机械手臂由臂体、肘部、手腕和手爪等部分组成。每个部位都有不同的形状和尺寸要求,需要根据实际需要进行设计。同时,由于仿生机械手臂需要完成不同的任务,所以还需要根据任务需求确定不同的工具头,如...
”仿生机械手系列“ 的搜索结果
说起手的作用,费斯托一直都有个美好的愿望,未来我们的仿生机械手可以和人工完美协作,广泛应用在生活生产中的各个方面。到那时别说抓取搬运,就算休闲娱乐也没问题! 抛光包浆,盘它! ...

1.简要叙述电驱动四足机器人的发展历史.电驱动四足机器人的发展历史可以追溯到20世纪60年代。当时,研究人员开始尝试使用电动马达和传感器来设计和构建四足机器人,以模仿动物的步态和行为。然而,由于当时技术水平...

仿生机器人手指 本设计基于一个简单但有效的想法:使用主动肌和阻抗方法来实现机器人手指的弯曲和伸展,遵循一种生物启发的方法,即稳定...更具体地说,可以开发具有各种几何结构的手指基架的机械手。线和二维多面体几
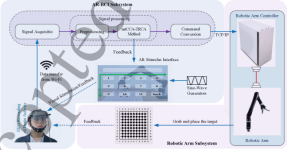
在整个机器人系统中,机械臂类似于人类的手臂,模仿人手的功能,场对智能机器人的要求愈发严苛,机械臂抓取正在向可靠、快速和精确方向发展,升了粗配准阶段的精度,降低了精配准的计算时间,整体上减少了算法的计算...
仿生智能与机器人1(2021)100001仿生智能与机器人学发展综述王建坤a,1,陈渭南a,1,肖晓a,1,徐阳新b,1,李晨明b,肖佳b,Max Q.-H. 孟a,b,c,a中国深圳南方科技大学电子电气工程系b香港中文大学电子工程系,...
仿生智能与机器人3(2023)100084研究用于人机协作的仿生变刚度关节结构设计与刚度匹配控制张秀丽a,黄立群b,牛昊aa北京交通大学机械电子与控制工程学院,北京100044b北京小米手机软件有限公司北京市朝阳区朝阳路...
仿生智能与机器人2(2022)100030仿生多足软体机器人的分析与控制孙丹英a,b,1,张靖宇a,b,1,秦芳a,b,向平宇a,b,薛延安a,b,c,王跃a,b,熊荣a,b,卢浩建a,b,浙江大学工业控制与技术国家重点实验室,...
本研究项目旨在梳理仿生假肢领域产品系列,洞悉行业特点、市场存量空间及增量空间,并结合市场发展前景判断仿生假肢领域内各类竞争者所处地位。 中国市场核心厂商包括Steeper Inc、?ssur、Coapt,LLC、...
仿生智能与机器人3(2023)100090研究一种vNOTES腹腔内升壁装置的设计与分析王杰a,b,1,周越a,1,肖晓c,刘晓,王教乐d,刘丽a,刘晓,2a香港中文大学电子工程系,香港999077,中国b清华大学生物医学工程系,北京...
仿生智能与机器人2(2022)100029四足机器人的发展概况:关节构型、动态运动控制方法和移动操作方法柴辉a、b,李宜宾a、b,刘晓波a、b,宋瑞a、b,张国腾a、b,张中Qa、b、c,宋柳a、b,侯锦棉a,b,辛亚贤a,b,...
仿生智能与机器人3(2023)100086研究仿生扑翼无人机建模精度与试验验证研究黄明阳伦敦帝国学院交通研究中心,伦敦SW7 2AZ,英国ar t i cl e i nf o文章历史记录:2022年9月23日收到2022年12月1日修订2022年12月21日...

软体机械臂的传统刚性机械臂由于灵活度和安全性等原因,在一些狭窄复杂的特殊场景下不适合应用。随着新材料的不断发展,具有更高灵活性的软体机器人研究引发热潮。软体机器人灵感来源于自然界中仿生动物,比如模仿蛇...


来源:资本实验室尽管人类已经借助科技的力量改造了世界,但许多技能仍然为人类所不拥有,很多恶劣的环境仍然是人类的禁区。而经过大自然的“公平选择”,使得某些生物具有我们所不具...
参考学习资料:①:路径规划学习笔记之一—概述 - 古月居②:路径规划五种算法简述及对比 - 知乎机器人的运动规划(motion planning)包括路径规划(path planning)和轨迹规划(trajectory planning)。...
Unimate机器人系列 为球形坐标系统,手臂可移进移出,绕其坐标移动,还可以做旋转的纵向移动。当前机器人 臂的研制目标是通过现有系统的组合或利用完全不同的设计思想开发更灵活、更有适应 能力的坐标系统。如伯明翰...
基于人类手的结构和功能,设计者认为拟人化是手设计中的一个重要特征,它可以改善人们日常生活中的各种任务。在这个设计中,拟人化体现在两个具体的设计选择上: 1)使用拟人运动学模型; 2)使用仿生手指驱动和传动...

▼ 大型年度AI人物评选——2017中国AI英雄风云榜已于12月4日在乌镇张榜,12月18日在北京国贸三期举行颁奖典礼。 榜单评选出年度技术创新人物TOP 10;商业创新人物TOP 10,获取...【网易智能讯 12月12日消息】
Dexterous hand是一款新的末端执行器是模仿人类的手掌进行仿生,来实现物体的抓取,拿放等功能,主要是通过IO控制,电力控制的方式。大家好,今天这篇文章的主要内容是讲解以及使用一些myCobot 280 的配件,来了解...
中空旋转平台,金属云台,机械臂旋转底盘,机器人关节,中空金属转台
推荐文章
- 分享66个焦点幻灯JS特效,总有一款适合您_js 幻灯片-程序员宅基地
- Qt: 窗口的显示和隐藏_qt释放还是隐藏对话框dialog.accept()-程序员宅基地
- 【风电功率预测】海洋捕食算法MPA优化BP神经网络风电功率预测【含Matlab源码 3770期】-程序员宅基地
- 2023研究生英语二真题笔记_2023年研英语二-程序员宅基地
- SpringBoot_第二章(案例入门)_第二章快速入门案例-程序员宅基地
- WebMvcConfigurer 详解_webmvcconfigurer extendmessageconverters-程序员宅基地
- sqlserver修改实例名_sqlserver修改实例名称-程序员宅基地
- Mac adb devices时,一直显示emulator-5554 offline如何解决_mac emulator-5554 offline-程序员宅基地
- Delphi XE10,Json 生成和解析,再利用indyhttp控件Post_delphixe json post-程序员宅基地
- 一个简单的基于MVC模式的登录验证过程_mvc的网站登录验证应用: 建立几个jsp页面,在这里我们主要做登录,所以我们要建logi-程序员宅基地